Halo teman2, Kali ini saya akan coba share cara pembuatan rangkaian Remote Steering untuk Radio Motorola seri GM, umumnya radio radio ini digunakan untuk Repeater. sehingga rancangan radio pun sedikit berbeda dengan radio yang biasa kita gunakan dirumah. kalo radio yang biasa kita gunakan dirumah dilengkapi display yang lengkap, S-meter, VFO mode & Memory Mode, fitur Scanning, dan fitur fitur hebat lainya, kemudian kontrol handle yang lengkap hingga digit input nomor secara manual untuk langsung mengetikan frekuensi yang diinginkan.
Berbeda dengan Motorola seri GM ini karena lebih banyak digunakan untuk Repeater sehingga fitur2 hebat diatas pun dihilangkan. tetapi ada kelebihan lain yaitu rancangan yang memang lebih tangguh untuk digunakan secara nonstop.
Kembali ke topik. yaitu “Remote Channel Steering” lalu apa hubungan nya dengan Radio Motorola seri GM? hubungan nya yaitu radio ini sering kali digunakan untuk RPU / Repeater yang disimpan di tempat2 ketinggian untuk menjangkau sinyal2 dari pengguna RPU tersebut ( seperti di gunung ). artian remote channel steering disini tidak lain adalah “Memindahkan Channel Radio secara Remote” tanpa kita harus menekan tombol2 di radio secara langsung. kita cukup kiriman nada2 tone DTMF dari tempat yang berbeda dan kita sudah bisa memindahkan channel radio tersebut.
silahkan cek video berikut :
pada video diatas terlihat saya memindahkan channel radio Motorola GM300 melalui radio HT / Handytalky yang saya pegang ( Alinco DJ496 ). dengan metode seperti diatas kita tidak lagi terbatas dengan keberadaan pesawat. selama sinyal nya bisa diterima dengan baik oleh si GM300. kita bisa melakukan remote channel.
Wokey kita lanjutkan lagi ke pembahasan lebih teknis. untuk memungkinkan cara diatas. ada 1 fitur dari radio GM ini yang harus kita setting, atau bahasa lain nya ( di program terlebih dahulu ) tentunya dengan software Motorola. fitur yang harus kita aktifkan yaitu “Channel Select” . Radio Motorola seri GM ini umum nya memilki soket 16 pin di bagian belakang. bermacam keperluan seperti port audio, cos, ptt control, speaker out. bahkan programable I/O seperti channel select ini. jadi kita tentukan terlebih dahulu pin mana saja yang akan diaktifkan sebagai “channel select” tersebut.
berikut pin mapping dari radio GM yang memiliki 16 pin di belakang radio.

dari gambar diatas kita bisa perhatikan penomoran angka pin nya. agar dicocokan dengan software motorola nya.
berikut ini foto setting yang saya gunakan untuk mengaktifkan fungsi “Channel select1 sampai 5”

umumnya pin COS atau CSQ detect ini pada pin 8. namun untuk keperluan channel steering ini pin COS dipindahkan terlebih dahulu ke pin 4. karena pin 8 digunakan oleh salah satu pin Channel select.
lalu bagimana cara kerja “channel select tersebut” sehingga bisa memindahkan channel radio hanya menggunakan beberapa pin saja?
cara kerjanya yaitu kita memasukan input biner pada pin pin diatas sesuai dengan setting nya yaitu “active low” = logic 1. dan open sebagai logic 0. atau dengan kata lain untuk logic 1 kita hubungkan dengan ground. dan untuk logic 0 biarkan pin tsb tidak tersambung kemanapun.
berikut ini contoh input beberapa channel untuk steering.
rubah terlebih dahulu angka desimal ke biner menggunakan kalkulator ( mode programmer ).
kita ambil contoh channel 1. artinya angka desimal nya adalah 1 juga. bila kita konversi ke biner hasil nya 00001 juga. lalu masukan angka2 biner itu ke channnel select pin yang sudah kita setting dimulai dari angka paling besar ( channel select 5 ) seperti contoh dibawah ini :
channel select 1 = 1
channel select2 = 0
channel select 3 = 0
channel select 4 = 0
channel select 5 = 0
1 = grounded, 0 = open
kita coba contoh channel lain yaitu 5. kita coba konversi ke biner hasilnya adalah : 00101
kalau kita settingkan ke radio yaitu :
channel select 1 = 1
channel select2 = 0
channel select 3 = 1
channel select 4 = 0
channel select 5 = 0
kita ambil 1 lagi contoh yaitu channel 31. kita konversi ke biner yaitu 11111 kalo kita inputkan ke radio yaitu :
channel select 1 = 1
channel select 2 = 1
channel select 3 = 1
channel select 4 = 1
channel select 5 = 1
cukup mudah kan ?
untuk metode manual kita bisa gunakan dioda untuk switching channel seperti gambar dibawah ini :
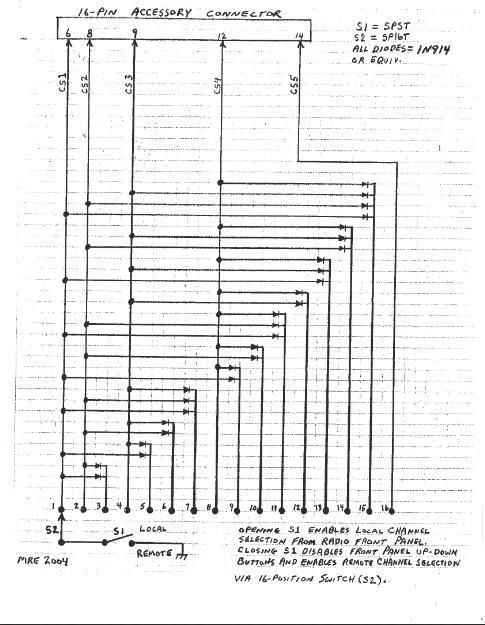
switching diatas cukup menggunakan dioda yang disambungkan ke ground untuk selecting channel.
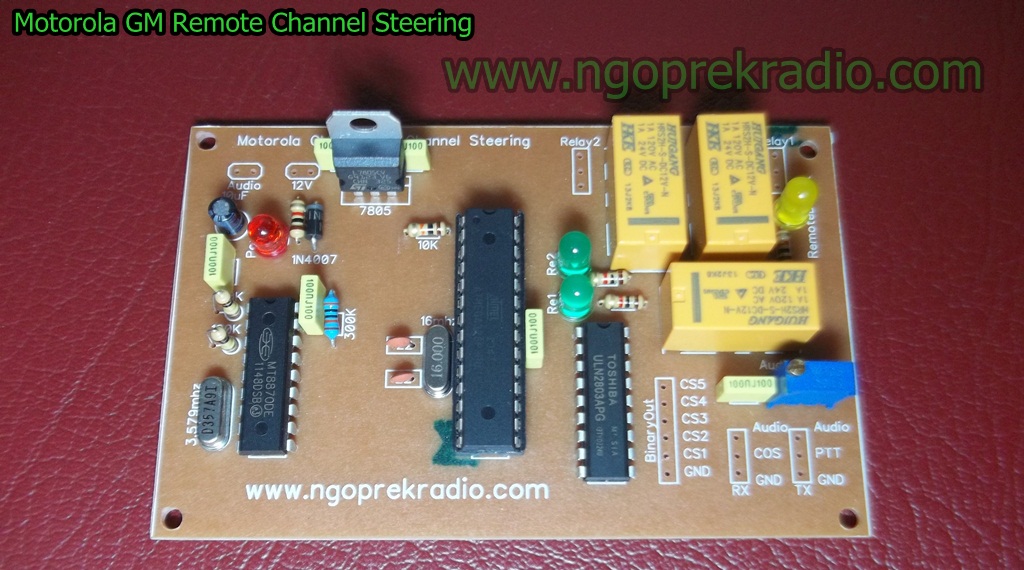
lalu saya coba buat metode switching diatas menggunakan bantuan mikrokontroller “Arduino” & IC DTMF to BCD decoder. sehingga pemindahan channel bisa dikombinasikan dengan beberapa angka rahasia. atau beberapa digit yang dirahasiakan. diikuti dengan channel yang akan kita pilih.
secara bahan hampir sama seperti rancangan sebelumnya yaitu remote relay menggunakan DTMF. namun sedikit berbeda pada pemrosesan nya.
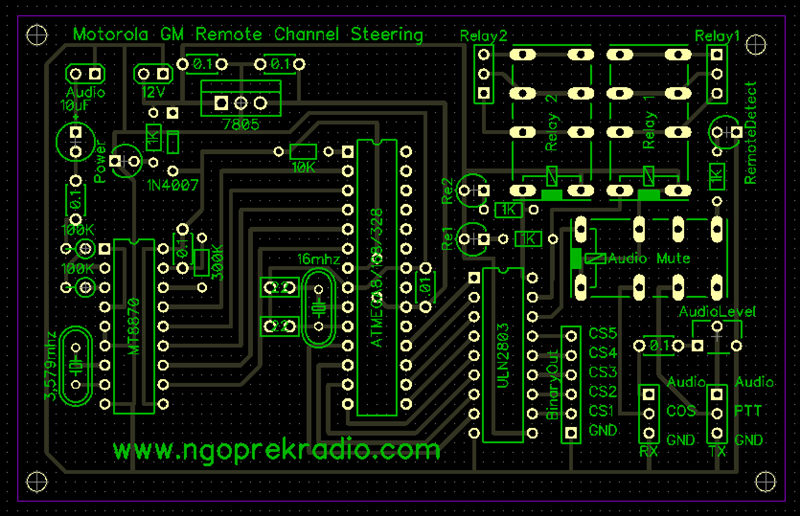
IC sebelah kiri adalah MT8870 bertugas sebagai receiver DTMF kemudian output nya adalah BCD ( Binary Coded Decimal ) dan 1 kaki trigger / signal detect. sehingga ada 5 port yang dimasukan ke Atmega328 dari MT8870. dari ke 5 sinyal itu diproses selanjutnya di identifikasi angka angka apa saja yang diterima oleh IC dtmf receiver tersebut. kemudian Atmega328 melakukan proses seleksi angka kombinasi yang dimasukan dan diikuti input channel. lalu action nya adalah menentukan status output dari CS1. CS2, CS3, CS4 & CS5 menjadi binary sesuai dengan input channel yang diinginkan.
output dari atmega untuk logic 1 adalah 5 volt. dan untuk logic 0 adalah 0 volt atau open. berhubung Motorola GM yang kita setting untuk logic 1 adalah LOW. sehingga kita lewatkan dulu ke IC ULN2803 yaitu IC yang terdiri dari transistor2 mode darlington. sehingga jika kita masukan 5 volt pada input. output dari IC tersebut adalah LOW di setiap channel.
Pasti anda akan bertanya, mengapa menggunakan IC tersebut. tidak langsung saja dari atmega menuju ke pin Radio Motorola. itu sangat memungkinkan. namun pada rancangan ini ada 3 relay tambahan yaitu 2 relay serbaguna yang bisa kita gunakan untuk apa saja seperti mematikan atau menyalakan radio lainya. juga 1 relay yang bertugas untuk mematikan sinyal ke radio TX pada saat kita melakukan remote. yang tujuan nya agar tone tone DTMF itu tidak bisa didengarkan oleh orang lain. jadi untuk bisa mengangkat relay tersebut dibutuhkan tambahan transistor untuk switching atau menggunakan IC ULN2803. karena pada umumnya output digital port pada atmega hanya mampu mengangkat beban kecil dan relay diatas bekerja pada 12 Volt. sedangkan atmega328 bekerja pada 5 Volt untuk logic 1.
Lalu bagaimana dengan isi mantra Atmega328 nya, yang saya tulis disini menggunakan bahasa C Arduino. jd silahkan upload menggunakan software Arduino IDE. untuk downloader bisa menggunakan USBasp. dan pilih upload using programmer.
berikut isi mantra nya :
[spoiler title=”Mantra”]
[pastacode lang=”c” message=”Motorola GM Remote Channel Steering” highlight=”” provider=”manual”]
/*
####################################
Motorola GM Remote Channel Steering
by Angga S Arly
anggafunkadelic@gmail.com
www.ngoprekradio.com
2014
####################################
*/
#include <EEPROM.h> // loding librari eeprom
const int BCDPin1 = 4;
const int BCDPin2 = 3;
const int BCDPin3 = 2;
const int BCDPin4 = 1;
const int BCDPinX = 0;
// state BCD dari MT8870
int BCDState1 = 0;
int BCDState2 = 0;
int BCDState3 = 0;
int BCDState4 = 0;
int BCDStateX = 0;
// state hasil decode ke desimal
int S0 = 0;
int S1 = 0;
int S2 = 0;
int S3 = 0;
int S4 = 0;
int S5 = 0;
int S6 = 0;
int S7 = 0;
int S8 = 0;
int S9 = 0;
int SB0 = 0; // bintang
int SP0 = 0; // pager
// konci kombinasi
int D1 = 0;
int D2 = 0;
int D3 = 0;
int D4 = 0;
int D5 = 0;
int D6 = 0;
int D7 = 0;
int U1 = 0;
int V1 = 0;
int W1 = 0;
int X1 = 0;
int Y1 = 0;
int Z1 = 0;
// alokasi pin output / relay
const int LedPin1 = 5;
const int LedPin2 = 6;
const int LedPin3 = 7;
const int LedPin4 = 8;
const int LedPin5 = 9;
const int LedPin6 = 10;
const int LedPin7 = 11;
const int LedPin8 = 12;
const int LedPin9 = 13;
// loding eeprom
int baca = 0;
int bacaR1 = 0;
int bacaR2 = 0;
void setup() {
//alokasi pin input ( BCD )
pinMode(BCDPin1, INPUT);
pinMode(BCDPin2, INPUT);
pinMode(BCDPin3, INPUT);
pinMode(BCDPin4, INPUT);
pinMode(BCDPinX, INPUT);
// alokasi pin output ( Relay )
pinMode(LedPin1, OUTPUT);
pinMode(LedPin2, OUTPUT);
pinMode(LedPin3, OUTPUT);
pinMode(LedPin4, OUTPUT);
pinMode(LedPin5, OUTPUT);
pinMode(LedPin6, OUTPUT);
pinMode(LedPin7, OUTPUT);
pinMode(LedPin8, OUTPUT);
pinMode(LedPin9, OUTPUT);
bacaeeprom();
}
void bacaeeprom() {
baca = EEPROM.read(100);
if ( baca == 1 ) {
ch01();
}
if ( baca == 2 ) {
ch02();
}
if ( baca == 3 ) {
ch03();
}
if ( baca == 4 ) {
ch04();
}
if ( baca == 5 ) {
ch05();
}
if ( baca == 6 ) {
ch06();
}
if ( baca == 7 ) {
ch07();
}
if ( baca == 8 ) {
ch08();
}
if ( baca == 9 ) {
ch09();
}
if ( baca == 10 ) {
ch10();
}
if ( baca == 11 ) {
ch11();
}
if ( baca == 12 ) {
ch12();
}
if ( baca == 13 ) {
ch13();
}
if ( baca == 14 ) {
ch14();
}
if ( baca == 15 ) {
ch15();
}
if ( baca == 16 ) {
ch16();
}
if ( baca == 17 ) {
ch17();
}
if ( baca == 18 ) {
ch18();
}
if ( baca == 19 ) {
ch19();
}
if ( baca == 20 ) {
ch20();
}
if ( baca == 21 ) {
ch21();
}
if ( baca == 22 ) {
ch22();
}
if ( baca == 23 ) {
ch23();
}
if ( baca == 24 ) {
ch24();
}
if ( baca == 25 ) {
ch25();
}
if ( baca == 26 ) {
ch26();
}
if ( baca == 27 ) {
ch27();
}
if ( baca == 28 ) {
ch28();
}
if ( baca == 29 ) {
ch29();
}
if ( baca == 30 ) {
ch30();
}
if ( baca == 31 ) {
ch31();
}
bacaR1 = EEPROM.read(41);
bacaR2 = EEPROM.read(51);
if ( bacaR1 == 1 ) { R1on(); }
if ( bacaR1 == 0 ) { R1off(); }
if ( bacaR2 == 1 ) { R2on(); }
if ( bacaR2 == 0 ) { R2off(); }
} // END baca eeprom
void cekinput() {
BCDState1 = digitalRead(BCDPin1);
BCDState2 = digitalRead(BCDPin2);
BCDState3 = digitalRead(BCDPin3);
BCDState4 = digitalRead(BCDPin4);
BCDStateX = digitalRead(BCDPinX);
if (BCDStateX == HIGH) {
// detek 0
if (BCDState1 == LOW) {
if (BCDState2 == HIGH) {
if (BCDState3 == LOW) {
if (BCDState4 == HIGH) {
S0 = 1;
}
}
}
}
// detek 1
if (BCDState1 == HIGH) {
if (BCDState2 == LOW) {
if (BCDState3 == LOW) {
if (BCDState4 == LOW) {
S1 = 1;
}
}
}
}
// detek 2
if (BCDState1 == LOW) {
if (BCDState2 == HIGH) {
if (BCDState3 == LOW) {
if (BCDState4 == LOW) {
S2 = 1;
}
}
}
}
// detek 3
if (BCDState1 == HIGH) {
if (BCDState2 == HIGH) {
if (BCDState3 == LOW) {
if (BCDState4 == LOW) {
S3 = 1;
}
}
}
}
// detek 4
if (BCDState1 == LOW) {
if (BCDState2 == LOW) {
if (BCDState3 == HIGH) {
if (BCDState4 == LOW) {
S4 = 1;
}
}
}
}
// detek 5
if (BCDState1 == HIGH) {
if (BCDState2 == LOW) {
if (BCDState3 == HIGH) {
if (BCDState4 == LOW) {
S5 = 1;
}
}
}
}
// detek 6
if (BCDState1 == LOW) {
if (BCDState2 == HIGH) {
if (BCDState3 == HIGH) {
if (BCDState4 == LOW) {
S6 = 1;
}
}
}
}
// detek 7
if (BCDState1 == HIGH) {
if (BCDState2 == HIGH) {
if (BCDState3 == HIGH) {
if (BCDState4 == LOW) {
S7 = 1;
}
}
}
}
// detek 8
if (BCDState1 == LOW) {
if (BCDState2 == LOW) {
if (BCDState3 == LOW) {
if (BCDState4 == HIGH) {
S8 = 1;
}
}
}
}
// detek 9
if (BCDState1 == HIGH) {
if (BCDState2 == LOW) {
if (BCDState3 == LOW) {
if (BCDState4 == HIGH) {
S9 = 1;
}
}
}
}
// detek *
if (BCDState1 == HIGH) {
if (BCDState2 == HIGH) {
if (BCDState3 == LOW) {
if (BCDState4 == HIGH) {
SB0 = 1;
}
}
}
}
// detek #
if (BCDState1 == LOW) {
if (BCDState2 == LOW) {
if (BCDState3 == HIGH) {
if (BCDState4 == HIGH) {
SP0 = 1;
}
}
}
}
}
} // END cekinput
// password 347
void cekkombinasi() {
if ( S3 == 1 ) {
D1 = 1;
}
if ( D1 == 1 ) {
if ( S4 == 1 ) {
D2 = 1;
}
}
if ( D2 == 1 ) {
if ( S7 == 1 ) {
D3 = 1;
}
}
// selain angka password reset aja cong
if ( S4 == 1 ) {
if ( D1 == 0 ) {
resetkombinasi();
}
}
if ( S7 == 1 ) {
if ( D2 == 0 ) {
resetkombinasi();
}
}
// lanjuutt
if ( SP0 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
if ( SB0 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
if ( S0 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
if ( S1 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
if ( S2 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
// yang mengandung angka password disable ajah yaksz
//if ( S3 == 1 ) {
// if ( D3 == 0 ) {
// resetkombinasi();
// }
//}
//if ( S4 == 1 ) {
// if ( D3 == 0 ) {
// resetkombinasi();
// }
//}
if ( S5 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
if ( S6 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
//if ( S7 == 1 ) {
// if ( D3 == 0 ) {
// resetkombinasi();
// }
//}
if ( S8 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
if ( S9 == 1 ) {
if ( D3 == 0 ) {
resetkombinasi();
}
}
} //END cekkombinasi
void cek6digit() {
if ( D3 == 1 ) {
if ( S0 == 1 ) {
U1 = 1;
//resetinput();
delay(300);
}
}
if ( D3 == 1 ) {
if ( S1 == 1 ) {
V1 = 1;
//resetinput();
delay(300);
}
}
if ( D3 == 1 ) {
if ( S2 == 1 ) {
W1 = 1;
//resetinput();
delay(300);
}
}
if ( D3 == 1 ) {
if ( S3 == 1 ) {
X1 = 1;
//resetinput();
delay(300);
}
}
if ( D3 == 1 ) {
if ( S4 == 1 ) {
Y1 = 1;
//resetinput();
delay(300);
}
}
if ( D3 == 1 ) {
if ( S5 == 1 ) {
Z1 = 1;
//resetinput();
delay(300);
}
}
resetinput();
} // END cek 3 digit
void channelselect() {
// kepala 0
if ( U1 == 1 ) {
if ( S1 == 1 ) { klir(); ch01(); EEPROM.write(100,1); resetsemuah(); }
else if ( S2 == 1 ) { klir(); ch02(); EEPROM.write(100,2); resetsemuah(); }
else if ( S3 == 1 ) { klir(); ch03(); EEPROM.write(100,3); resetsemuah(); }
else if ( S4 == 1 ) { klir(); ch04(); EEPROM.write(100,4); resetsemuah(); }
else if ( S5 == 1 ) { klir(); ch05(); EEPROM.write(100,5); resetsemuah(); }
else if ( S6 == 1 ) { klir(); ch06(); EEPROM.write(100,6); resetsemuah(); }
else if ( S7 == 1 ) { klir(); ch07(); EEPROM.write(100,7); resetsemuah(); }
else if ( S8 == 1 ) { klir(); ch08(); EEPROM.write(100,8); resetsemuah(); }
else if ( S9 == 1 ) { klir(); ch09(); EEPROM.write(100,9); resetsemuah(); }
} // END kepala 0
// kepala 1
if ( V1 == 1 ) {
if ( S0 == 1 ) { klir(); ch10(); EEPROM.write(100,10); resetsemuah(); }
else if ( S1 == 1 ) { klir(); ch11(); EEPROM.write(100,11); resetsemuah(); }
else if ( S2 == 1 ) { klir(); ch12(); EEPROM.write(100,12); resetsemuah(); }
else if ( S3 == 1 ) { klir(); ch13(); EEPROM.write(100,13); resetsemuah(); }
else if ( S4 == 1 ) { klir(); ch14(); EEPROM.write(100,14); resetsemuah(); }
else if ( S5 == 1 ) { klir(); ch15(); EEPROM.write(100,15); resetsemuah(); }
else if ( S6 == 1 ) { klir(); ch16(); EEPROM.write(100,16); resetsemuah(); }
else if ( S7 == 1 ) { klir(); ch17(); EEPROM.write(100,17); resetsemuah(); }
else if ( S8 == 1 ) { klir(); ch18(); EEPROM.write(100,18); resetsemuah(); }
else if ( S9 == 1 ) { klir(); ch19(); EEPROM.write(100,19); resetsemuah(); }
} // END kepala 1
// kepala 2
if ( W1 == 1 ) {
if ( S0 == 1 ) { klir(); ch20(); EEPROM.write(100,20); resetsemuah(); }
else if ( S1 == 1 ) { klir(); ch21(); EEPROM.write(100,21); resetsemuah(); }
else if ( S2 == 1 ) { klir(); ch22(); EEPROM.write(100,22); resetsemuah(); }
else if ( S3 == 1 ) { klir(); ch23(); EEPROM.write(100,23); resetsemuah(); }
else if ( S4 == 1 ) { klir(); ch24(); EEPROM.write(100,24); resetsemuah(); }
else if ( S5 == 1 ) { klir(); ch25(); EEPROM.write(100,25); resetsemuah(); }
else if ( S6 == 1 ) { klir(); ch26(); EEPROM.write(100,26); resetsemuah(); }
else if ( S7 == 1 ) { klir(); ch27(); EEPROM.write(100,27); resetsemuah(); }
else if ( S8 == 1 ) { klir(); ch28(); EEPROM.write(100,28); resetsemuah(); }
else if ( S9 == 1 ) { klir(); ch29(); EEPROM.write(100,29); resetsemuah(); }
} // END kepala 2
// kepala 3
if ( X1 == 1 ) {
if ( S0 == 1 ) { klir(); ch30(); EEPROM.write(100,30); resetsemuah(); }
else if ( S1 == 1 ) { klir(); ch31(); EEPROM.write(100,31); resetsemuah(); }
} // END kepala 3
// kepala 4
if ( Y1 == 1 ) {
if ( S0 == 1 ) { R1off(); EEPROM.write(41,0); resetsemuah(); }
else if ( S1 == 1 ) { R1on(); EEPROM.write(41,1); resetsemuah(); }
} // END kepala 4
// kepala 5
if ( Z1 == 1 ) {
if ( S0 == 1 ) { R2off(); EEPROM.write(51,0); resetsemuah(); }
else if ( S1 == 1 ) { R2on(); EEPROM.write(51,1); resetsemuah(); }
} // END kepala 4
} // END channel select
// Relay 1 & 2
void R1on() { digitalWrite(LedPin7, HIGH); }
void R1off() { digitalWrite(LedPin7, LOW); }
void R2on() { digitalWrite(LedPin8, HIGH); }
void R2off() { digitalWrite(LedPin8, LOW); }
void ch01() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void ch02() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void ch03() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void ch04() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void ch05() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void ch06() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void ch07() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void ch08() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch09() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch10() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch11() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch12() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch13() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch14() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch15() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, LOW);
}
void ch16() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch17() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch18() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch19() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch20() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch21() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch22() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch23() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, HIGH);
}
void ch24() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void ch25() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void ch26() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void ch27() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void ch28() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void ch29() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void ch30() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void ch31() {
digitalWrite(LedPin1, HIGH);
digitalWrite(LedPin2, HIGH);
digitalWrite(LedPin3, HIGH);
digitalWrite(LedPin4, HIGH);
digitalWrite(LedPin5, HIGH);
}
void klir() {
digitalWrite(LedPin1, LOW);
digitalWrite(LedPin2, LOW);
digitalWrite(LedPin3, LOW);
digitalWrite(LedPin4, LOW);
digitalWrite(LedPin5, LOW);
}
void resetinput() {
S1 = 0;
S2 = 0;
S3 = 0;
S4 = 0;
S5 = 0;
S6 = 0;
S7 = 0;
S8 = 0;
S9 = 0;
SB0 = 0;
S0 = 0;
SP0 = 0;
} // END resetinput
void resetkombinasi() {
D1 = 0;
D2 = 0;
D3 = 0;
D4 = 0;
D5 = 0;
D6 = 0;
D7 = 0;
} // END resetkombinasi
void resetkombinasi2() {
U1 = 0;
V1 = 0;
W1 = 0;
X1 = 0;
Y1 = 0;
Z1 = 0;
}
void remotedetect() {
if ( D1 == 1 ) {digitalWrite(LedPin6, HIGH);}
else if ( D1 == 0 ) {digitalWrite(LedPin6, LOW);}
} // END remote detect
void resetsemuah() {
resetkombinasi();
resetkombinasi2();
resetinput();
}
void loop(){
// cek masukan angka dari DTMF
cekinput();
if ( SB0 || SP0 == 1 ) { resetsemuah(); }
// cek dulu D3 kalo on jangan cek lagi
if ( D3 == 1 ) {}
else {cekkombinasi();}
// cek dulu 6 digit kalo on jangan cek lagi
if ( U1 == 1 ) {}
else if ( V1 == 1 ) {}
else if ( W1 == 1 ) {}
else if ( X1 == 1 ) {}
else if ( Y1 == 1 ) {}
else if ( Z1 == 1 ) {}
else {cek6digit();}
// lanjut pilih channel
channelselect();
// reset variable inputan angka2
resetinput();
// running led logging sementaun
remotedetect();
delay(10);
} // END loop
[/pastacode]
[/spoiler]
atau bisa klik link ini : http://pastebin.com/TEzNqArr#
sebetulnya
silahkan rubah angka password yang diinginkan, sample diatas menggunakan angka password nya adalah 347 diikuti dengan angka channel.
contoh ingin memindahkan ke channel 1 berikut susunan angka yang dimasukan nya : 34701
contoh ingin memindahkan ke channel 16 berikut angka nya : 34716
dan untuk menyalakan relay nomor 1 adalah : 34741
mematikan relay nomor 1 : 34740
menyalakan relay nomor 2 : 34751
mematikan relay nomor 2 : 34750
Sebelum memulai untuk membuat rangkaian diatas mohon diperhatkan point2 penting dibawah ini :
– fahami dengan baik cara kerja rangkaian diatas
– terbiasa menyolder
– pelajari terlebih dahulu cara upload sketch arduino
– memahami komponen2 elektronik.
Selamat mencoba, dan bagi teman2 yang tidak terbiasa menyolder dan tidak terbiasa membuat rangkaian2 elektronik kami sediakan yang sudah jadi, siap pakai dan sudah tested.
Thankyou.
Pak bisa minta tolong, dibuatkan 1, berapa harganya. Terima kasih